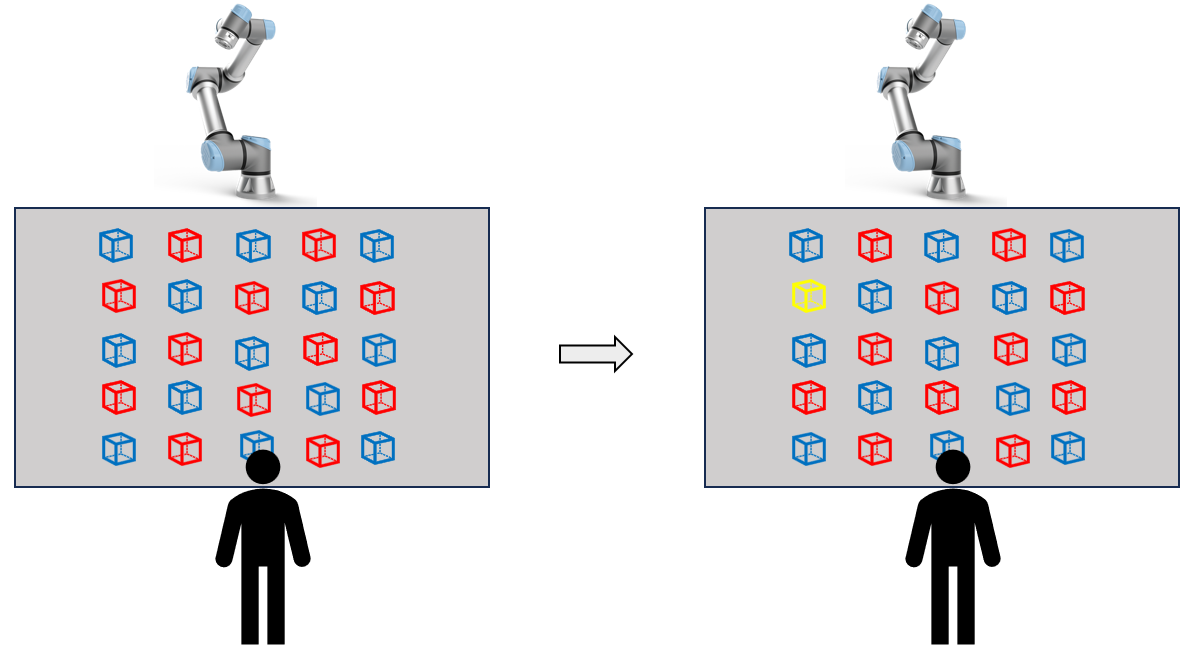
Change Objective
The robot is stopped while picking up a cube, which is not visible to the user as shown in the figure above. There are 25 cubes on the table, from which the robot can choose to change objective based on user input. Similar to the first experiment, the user’s input can include commands either relative to the user or relative to objects in the scene. For example, a user-relative command might be: “Don't take cubes on the right,” while an object-relative command could be: “Take cubes that are close to the robot.”